
category
训练代理人做出决策,以随着时间的推移实现回报最大化
欢迎回到我的AI博客!我们已经学到了很多,所以让我们回顾一下到目前为止我们在强化学习系列中所涵盖的内容:
- 第1部分:强化学习(RL)简介
- 第二部分:介绍马尔可夫过程
- 第3部分:马尔可夫决策过程(MDP)
使用MDP的最后一步是最优策略搜索,我们今天将介绍。
在本文结束时,您将对以下内容有一个基本的了解:
- 如何评估一个行动;
- 如何实现最优策略搜索。
正如你在第三部分中所记得的,我们一直在描述和评估一个名叫亚当的年轻人的状态和行为。
现在,我们的经纪人几乎准备好帮助他做出连续的决定,从而获得尽可能多的钱。我们开始吧!
最优策略搜索:代理如何选择最佳路径
现在我们了解了MDP,我们可以将其视为代理工作的环境。为了随着时间的推移获得最大的回报,该代理需要找到一个最优策略。也就是说,它必须确定在每个州采取的最佳行动。
⏩ 最优策略:在每个州采取最佳行动,随着时间的推移获得最大回报
为了帮助我们的代理做到这一点,我们需要两件事:
一种确定MDP中状态值的方法。
在特定状态下采取的行动的估计值。
1.贝尔曼最优性方程
贝尔曼最优方程为我们提供了估计每个状态最优值的方法,记为V*(s)。它通过计算一个州可以产生的预期奖励来估计该州的价值。
这是贝尔曼最优方程(状态值函数):

在哪儿:
- P(s,a,s')是代理选择动作a时从状态s到状态s'的转换概率。
- R(s,a,s’)是当代理选择动作a时,从状态s到状态s’的即时奖励。
- 𝛾 是折扣率。折扣奖励以递归方式编写。
你可能想知道如何将我上一篇文章中介绍的折扣奖励转换为递归符号。也许下面的计算过程会给你一个提示。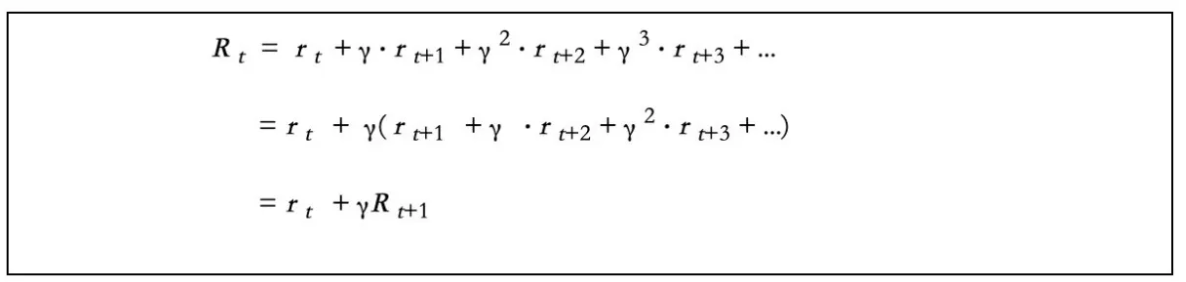
在实践中,您可以首先将所有状态值估计值初始化为零。然后,您使用上述公式计算的结果迭代地更新它们。这将证明是趋同的。
2.Q值迭代算法
仅凭最优状态值并不能告诉代理在每个状态下采取什么行动。幸运的是,受上述最优状态值概念的启发,Bellman为我们提供了一个类似的公式来估计状态-动作对的值,称为Q-value。
⏩ Q值:在状态s采取的行动a的估计值;记为Q*(s,a)
根据Q值得分,Q值明确地“告诉”代理人在每个状态下应该选择哪个动作。
以下是如何计算Q值:

在哪儿:
- P(s,a,s')是代理选择动作a时从状态s到状态s'的转换概率。
- R(s,a,s’)是当代理选择动作a时,从状态s到状态s’的即时奖励。
- 𝛾 是折扣率。折扣奖励以递归方式编写。
- max a'Qk(s',a')是状态s下最佳动作a'的值
注意:此函数假设代理在当前状态下选择操作后,其行为最佳。
与Bellman Optimality EquaEquation练习一样,您将首先将所有Q值估计值初始化为零。然后,使用此公式计算的结果迭代更新它们。
最优策略搜索的MDP实现
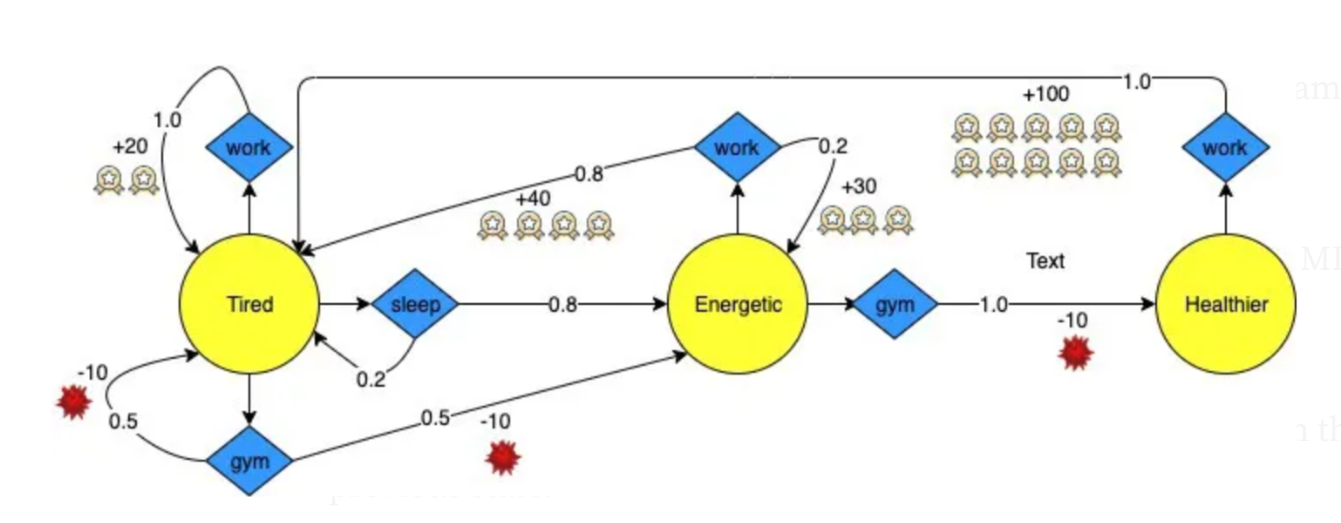
现在,让我们将所学付诸实践!我们将使用上图中朋友Adam的MDP来运行最优策略搜索。
首先,我们输入5元组(S,A,P,R,𝛾) 在我们的演示中创建MDP环境。
- 我们用nan来表示我们无法从前一个状态到达的状态。
- 变体动作是A。形状为(s,A)的动作空间是一个二维数组。
- P表示从状态s到状态s'的转换概率,选择动作a。它的形状应该是(s,a,s'),一个三维数组。
- R代表从状态s转换到s'后,由于动作a而获得的即时奖励。它的形状应该是(s,a,s'),一个三维数组。
import numpy as npnan = np.nanactions = [[0, 1, 2], [0, 2], [0]]P = np.array([[[1.0, 0.0, 0.0], [0.2, 0.8, 0.0], [0.5, 0.5, 0.0]],[[0.8, 0.2, 0.0], [nan, nan, nan], [0.0, 0.0, 1.0]],[[1.0, 0.0, 0.0], [nan, nan, nan], [nan, nan, nan]],])R = np.array([[[20., 0.0, 0.0], [0.0, 0.0, 0.0], [-10., -10., 0.0]],[[40., 30., 0.0], [nan, nan, nan], [0.0, 0.0, -10.]],[[70., 0.0, 0.0], [nan, nan, nan], [nan, nan, nan]],])
现在我们有了MDP环境!
让我们使用Q值迭代算法来获得Q*(s,a),其中包含状态s下动作a的得分。
- 我们使用-inf来表示我们不能在状态s中采取的操作。
- 用零初始化Q*(s,a)。
- 对于每次迭代,将Q值公式应用于从状态s到状态s'的每次转换,采取行动a,并用新结果更新Q*(s,a)。
Q = np.full((3, 3), -np.inf)
for s, a in enumerate(actions):
Q[s, a] = 0.0
discount_factor = 0.99
iterations = 10
for i in range(iterations):
Q_previous = Q.copy()
for s in range(len(P)):
for a in actions[s]:
sum_v = 0
for s_next in range(len(P)):
sum_v += P[s, a, s_next] * (R[s, a, s_next] +
discount_factor * np.max(Q_previous[s_next]))
Q[s, a] = sum_v
print(Q)以下是我们得到的Q:

这些行表示状态,而列表示动作,数字表示状态s下动作a的奖励。
Adam期待已久的成果
这是演示告诉我们的:当亚当感到疲劳时,最好的做法是去睡一觉,然后去健身房锻炼,这样他才能更健康,然后以最高效率去工作。
总结
在本系列中,我们学习了马尔可夫决策过程,它基于马尔可夫理论和马尔可夫链,支持强化学习。
理解MDP是深化RL知识的必要步骤,现在你已经走上了正轨!你应该知道如何:
- 对马尔可夫决策过程进行建模。构建环境,并设置从连续决策中计算奖励的方法。
- 折扣奖励。根据当前和未来奖励的价值评估RL中的行动。
- 实施最优策略搜索。使用贝尔曼最优方程和Q值迭代算法。
在我的下一篇文章中,我们将通过探索Q-learning进一步深入RL。跟我来,确保你不会错过!
- 登录 发表评论
- 20 次浏览
最新内容
- 6 days 14 hours ago
- 2 weeks 5 days ago
- 3 weeks 6 days ago
- 1 month ago
- 2 months 2 weeks ago
- 6 months 1 week ago
- 6 months 1 week ago
- 6 months 1 week ago
- 6 months 1 week ago
- 6 months 1 week ago